Variable gear preload for (virtual) play reduction
Gears are often used in precision engineering to create a transmission ratio. For gears to operate properly, a small amount of play or backlash is needed to prevent the transmission from seizing by uncontrollable teeth forces. However, in precision engineering, this play is often unwanted because it creates a position indeterminacy. A commonly used solution to this problem is to pretension the gears to remove this backlash. This pretension needs to be sufficiently high such that accelerations or external loads do not exceed the preload and gear contact is lost. However, because gears have a rolling contact but also a sliding component, this preload in combination with friction introduces virtual play. This is especially true in worm gear transmissions where the sliding component is large. The friction force, together with the stiffness determine the virtual backlash following equation $s_v=\frac{2|F_w|}{c}$where $F_w$ is the friction force and $c$ is the stiffness[1]. Therefore the engineer faces a trade-off: backlash or virtual play.
However, in point to point motions, this tradeoff is not necessarily true. The position determinacy is only important at the start and endpoint of the motion while the friction force is only present while the gears are in motion. Therefore, if a mechanism is designed that deactivates the preload while the gears are in motion and activates when the position has been reached, the best of both worlds can be achieved.
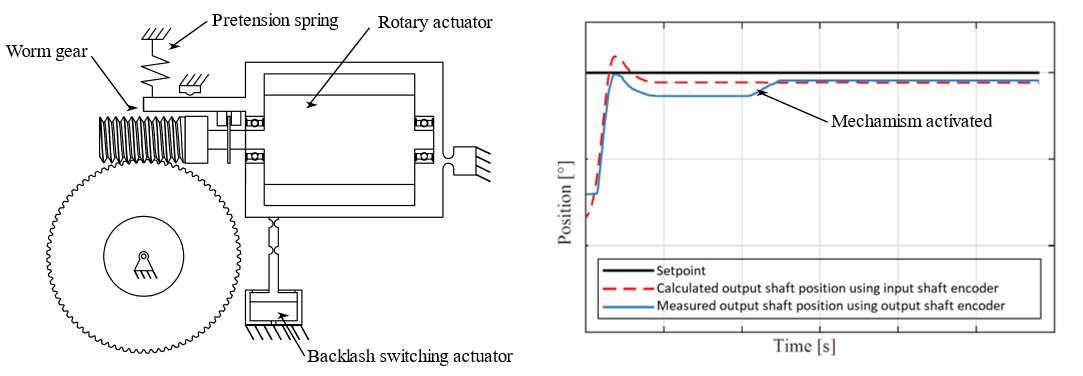
Figure 1 – Schematic overview of a worm gear transmission that can switch between a backlash and pretensioned state. The graph shows the effect in that the indeterminacy between the in and output shaft is much reduced when the mechanism is activated.
Figure 1 shows an embodiment of a worm gear transmission with backlash switch. It can be seen that backlash is present during positioning. When the mechanism is activated, the position indeterminacy between the in and output shaft is much reduced [2].
Figure 2 shows an embodiment of a straight gear transmission with such a mechanism where the preload is provided by a magnet actuator [3]. In this case, the pretension is not completely removed but is made proportional to tooth force $F_t$. The tooth force is dependent on the gearwheel torque and tooth faults which are mainly velocity dependent.
The preload $F_{pre}$ is chosen such that contact between the gearwheels is always just maintained. The exact relation between the preload and tooth force is described in the original document. This embodiment allows not only for accurate point to point motion but also for accurate tracking motion. A tradeoff is that virtual play will be higher and that control of the switching actuator will be more complex.
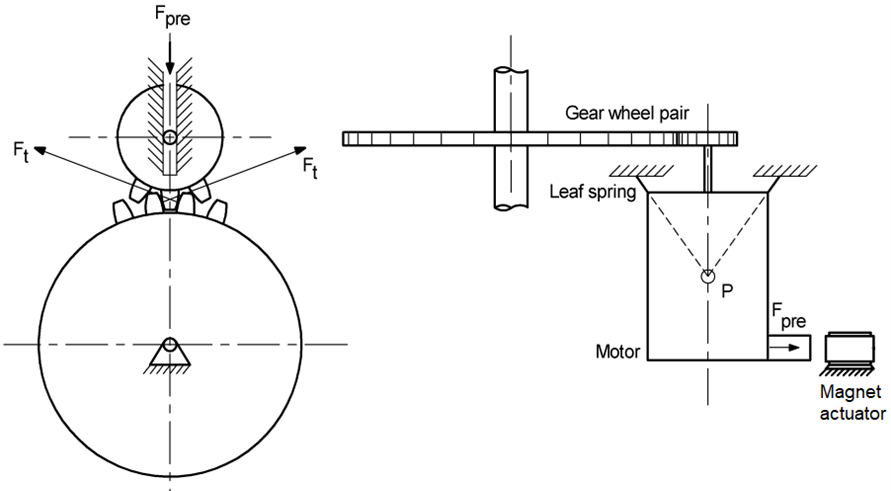
Figure 2 – Schematic overview of a straight gear transmission with variable pretension.
Principle
A variable pretension mechanism can be used to reduce virtual play leading to a reduction in position indeterminacy.
Developed by
Case 1: J. Mulder (Demcon, University of Twente)
Case 2: D.A. Schipper (Demcon) & P. Rutgers (Demcon)