Chapter 2 - Design using flexures
Chapter 3 - Design for static stiffness
Chapter 4 - Design for dynamic stiffness
Chapter 6 - Design for low friction and hysteresis
Chapter 9 - Design for load compensation
Fully flexure-based large range of motion precision hexapod
Six degree of freedom manipulation provides full control over position and orientation, essential for many applications. However, six degree of freedom closed kinematic parallel manipulators (hexapods) either have a limited range of motion combined with a good repeatability when made up of Flexure joints, or they have limited repeatability with a large workspace when using traditional rolling- or sliding-element bearings. The design of a fully Flexure-based large range of motion hexapod robot is presented, employing recent developments in large stroke Flexures joints. The obtained system allows for ±100 mm of translational and more than ±10 degrees of rotational range of motion in each direction combined with a mechanism volume below 0.25 m3. Furthermore, a dedicated Flexure-based design for the actuated joints combines high actuation forces with the absence of play and friction, allowing for accelerations exceeding 10 g. Experiments on a preliminary prototype validate the large workspace and confirm a high repeatability below 0.1 µm can be achieved, which is currently limited by the used electronics. The combination of 6 DOF, 200mm range and 0.1 µm repeatability is unprecedented.
With base-mounted rotating actuators a 6–RUS would result in an exact constraint design. However, the rz-rotation of the platform would be limited to about 18◦, because the single spherical joint per kinematic chain would need to accommodate all the torsion. With two spherical joints per kinematic chain there is much more platform rotation around rz possible. However, this comes at the cost kinematic indeterminacy, namely an internal DOF per kinematic chain. Statically this internal DOF does not negatively influence the support stiffness, as is the case with a compound parallel leafspring mechanism, see section 7.2.1.6. The accompanying vibration mode frequency can be designed way beyond the control bandwidth, and this mode can be damped relatively easy using a tuned mass damper for example, because the frequency does not change much when the platform goes through the range of motion. Therefore, a 6–RSS is preferred over a 6–RUS configuration.
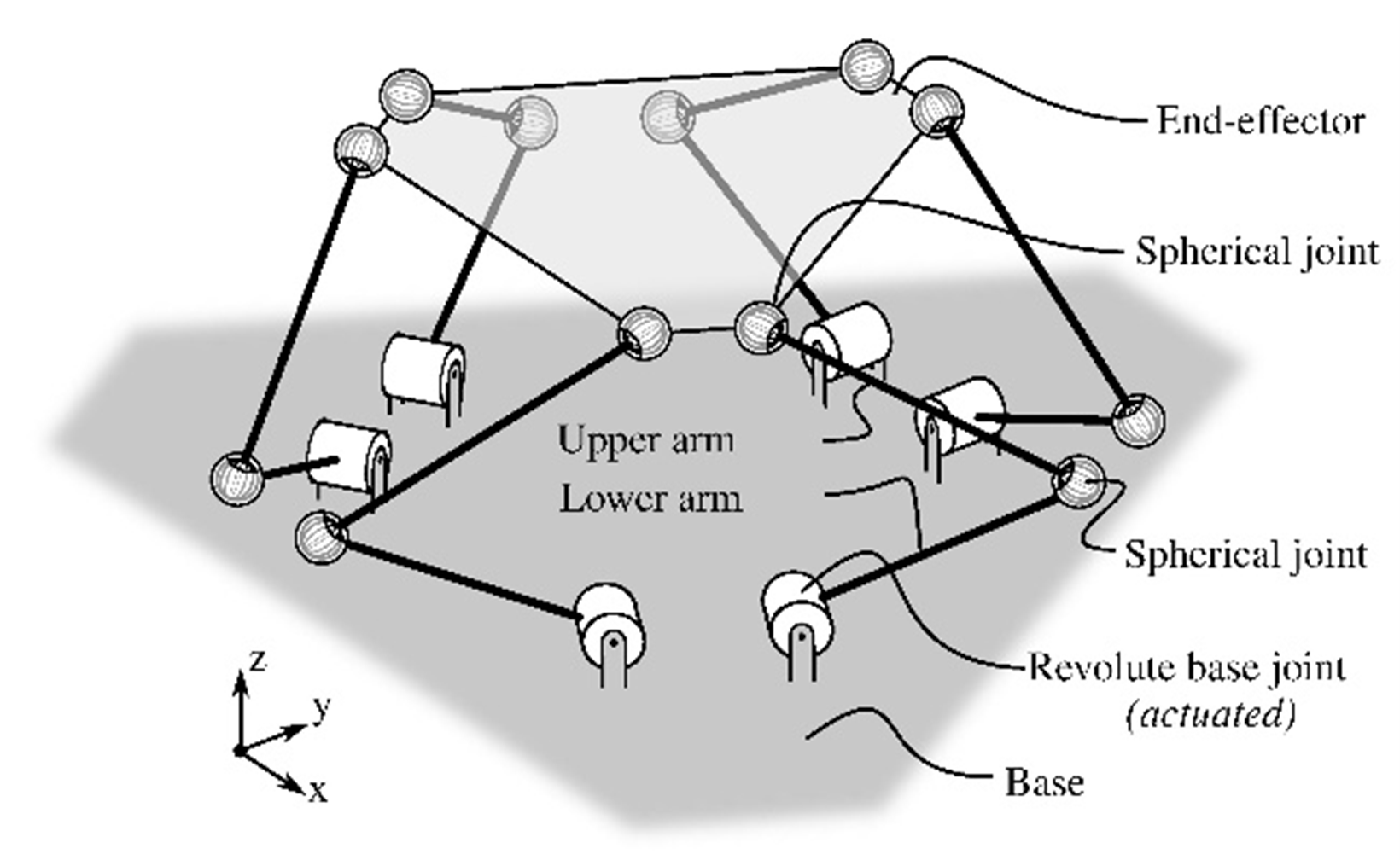 | 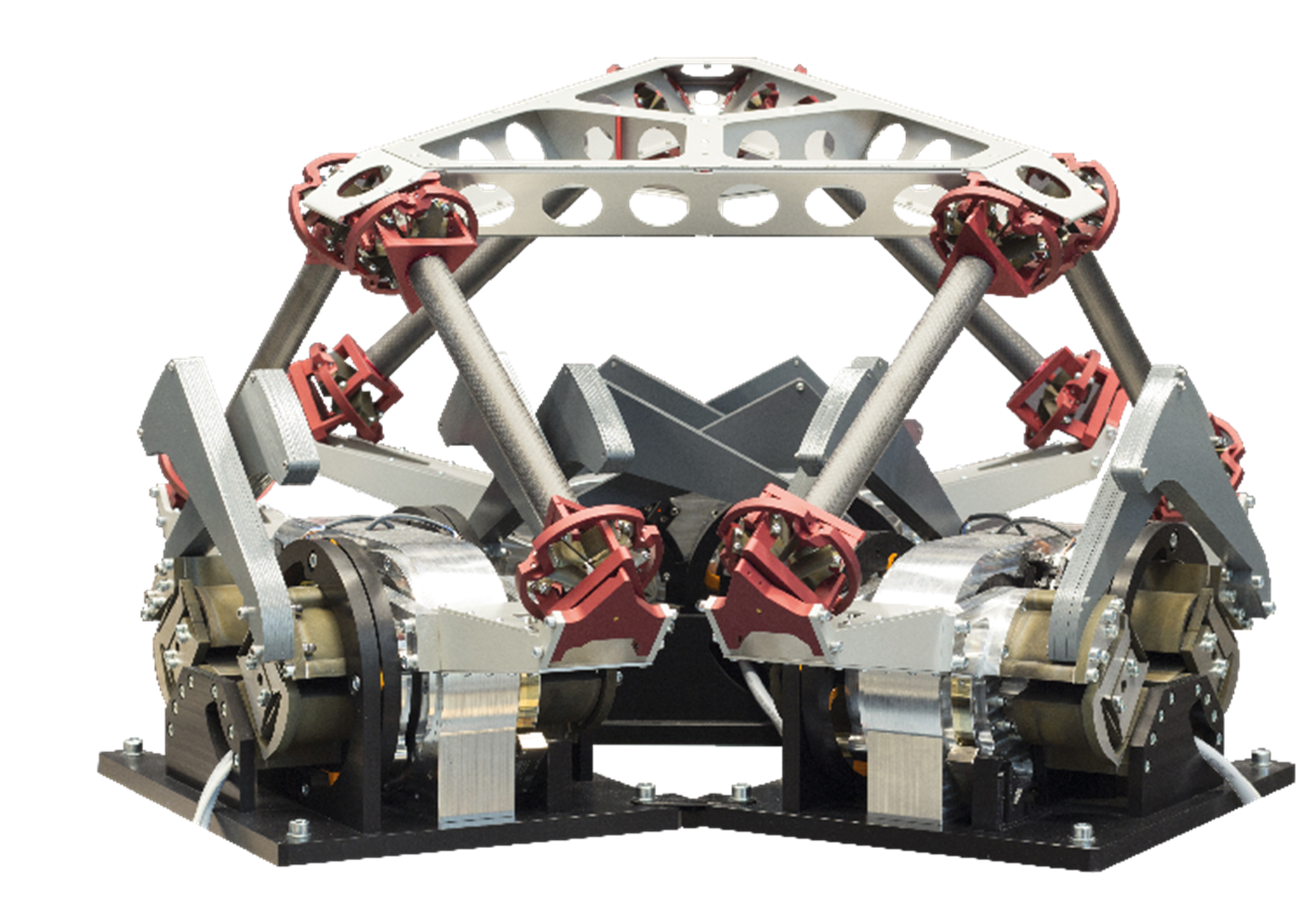 |
| Figure 1. 6- | Figure 2. The experimental test setup of the T-Flex hexapod with fully flexure-based metal joints and direct drive iron-core rotary motors |
Key Specifications
- 6 DOFs
- Parallel kinematic structure for low moving mass and large accelerations
- Fully flexure-based joints for high repeatability (no backlash, low hysteresis, no wear, no contamination)
- Direct drive iron-core rotary motors (back-drivable, no backlash, no contamination)
- H2 feedback control to optimally reject amplifier’s current noise
- Force feedback by actuator current measurement
- Dimensions: 650x650x400 mm
- Translational workspace: 5L with inner cube of 100x100x100mm
- Rotational travel range Rx, Ry, Rz (z the vertical axis): +/-15 degrees (15 degrees bidirectional)
- Repeatability: 50nm (limited by current noise)
- Load capacity: 10kg
- Acceleration: 5-10g (small payloads)
Developed by University of Twente
- M. Naves, M. Nijenhuis, R.G.K.M. Aarts, W.B.J. Hakvoort, D.M. Brouwer
Referentie Bron
Naves, M. , Nijenhuis, M. , Hakvoort, W. B. J. , & Brouwer, D. M. (2020). Flexure-based 60 degrees stroke actuator suspension for a high torque iron core motor. Precision engineering, 63, 105-114. https://doi.org/10.1016/j.precisioneng.2020.02.001
Naves, M. , Hakvoort, W. B. J. , Nijenhuis, M. , & Brouwer, D. M. (2020). T-Flex: A large range of motion fully flexure-based 6-DOF hexapod. In R. K. Leach, D. Billington, C. Nisbet, & D. Phillips (Eds.), Proceedings of the 20th International Conference of the European Society for Precision Engineering and Nanotechnology, EUSPEN 2020 (pp. 205-208). EUSPEN. https://www.euspen.eu/knowledge-base/ICE20183.pdf
Naves, M. , Aarts, R. G. K. M. , & Brouwer, D. M. (2019). Large stroke high off-axis stiffness three degree of freedom spherical flexure joint. Precision engineering, 56, 422-431. https://doi.org/10.1016/j.precisioneng.2019.01.011
Naves, M. (2021). Design and optimization of large stroke flexure mechanisms, PhD Thesis, University of Twente. https://doi.org/10.3990/1.9789036549943
Video link: T-Flex: Compliant Flexure-based Large Range Precision Hexapod – YouTube