Chapter 2 - Design using flexures
Chapter 3 - Design for static stiffness
Chapter 4 - Design for dynamic stiffness
Large stroke high off-axis stiffness 3DOF spherical flexure joint
Three degree of freedom spherical flexure joints are typically limited to small deflections because of their strong loss of stiffness in support directions when deflected. In this paper, a smartly stacked folded leafspring based large stroke spherical flexure joint is presented which can maintain a high level of support stiffness over a ±30 degrees tip-tilt and a ±10 degrees pan motion. To enable this large range of motion, two sets of three leafsprings are stacked in series. A large loss of support stiffness over the range of motion due to the underconstrained intermediate body is avoided by assuring that the instant centers of rotation coincide. The design has been optimized which has resulted in a Flexure joint design which can achieve a support stiffness of over 200 N/mm and a load capacity of 290 N at the maximum deflection angle. Experimental measurements validate the high level of support stiffness and load capacity over the entire range of motion [1].
 |  |
| Figure 1. Three Folded leafsprings in parallel with coincident intersection lines make a spherical hinge. The “E” represents the connection with the end-effector. | Figure 2. In series a second set of three folded leafsprings is attached. “E” represents the connection with the endeffector and “I” the connection with an intermediate stage |
 |  |
| Figure 3. Perspective view | Figure 4. Top view |
 | 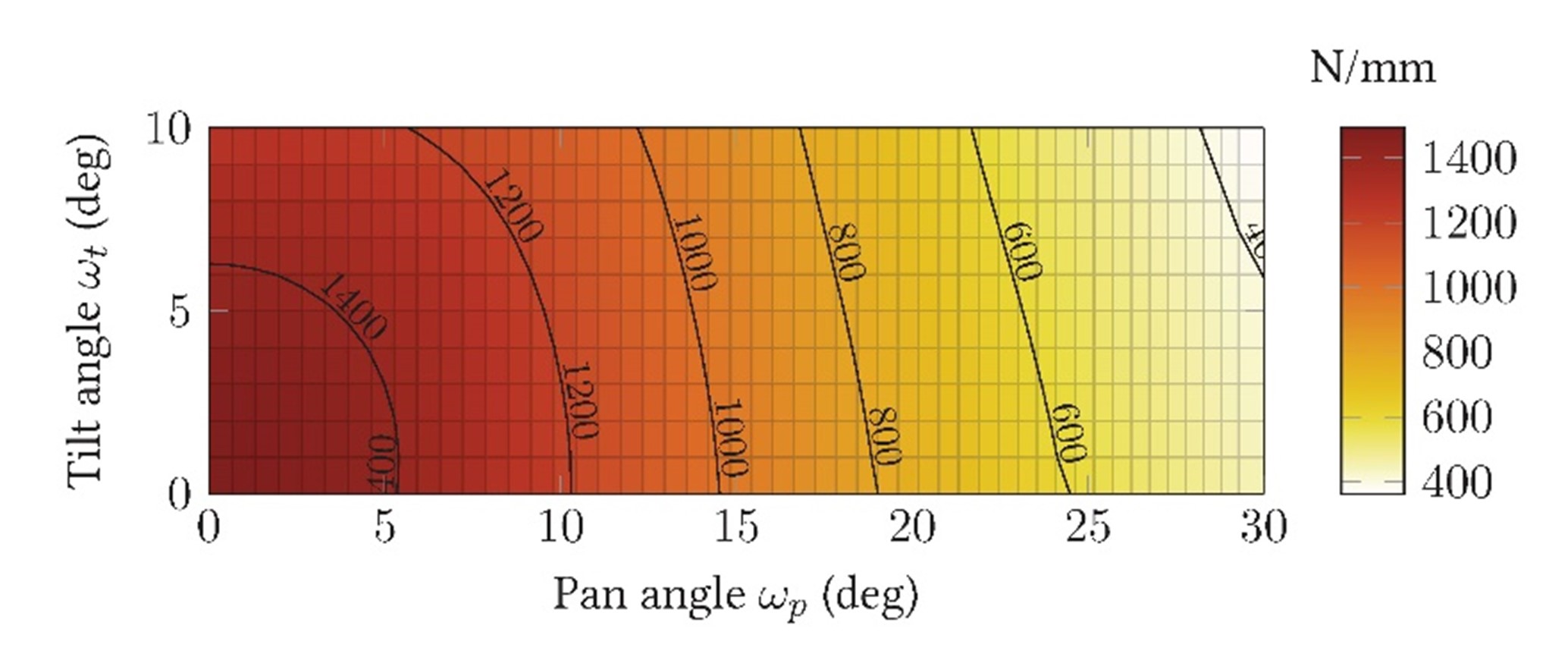 |
| Figure 5. Photograph of the spherical joint in deflected state | Figure 6. Vertical (along the pan-axis) translational support stiffness |
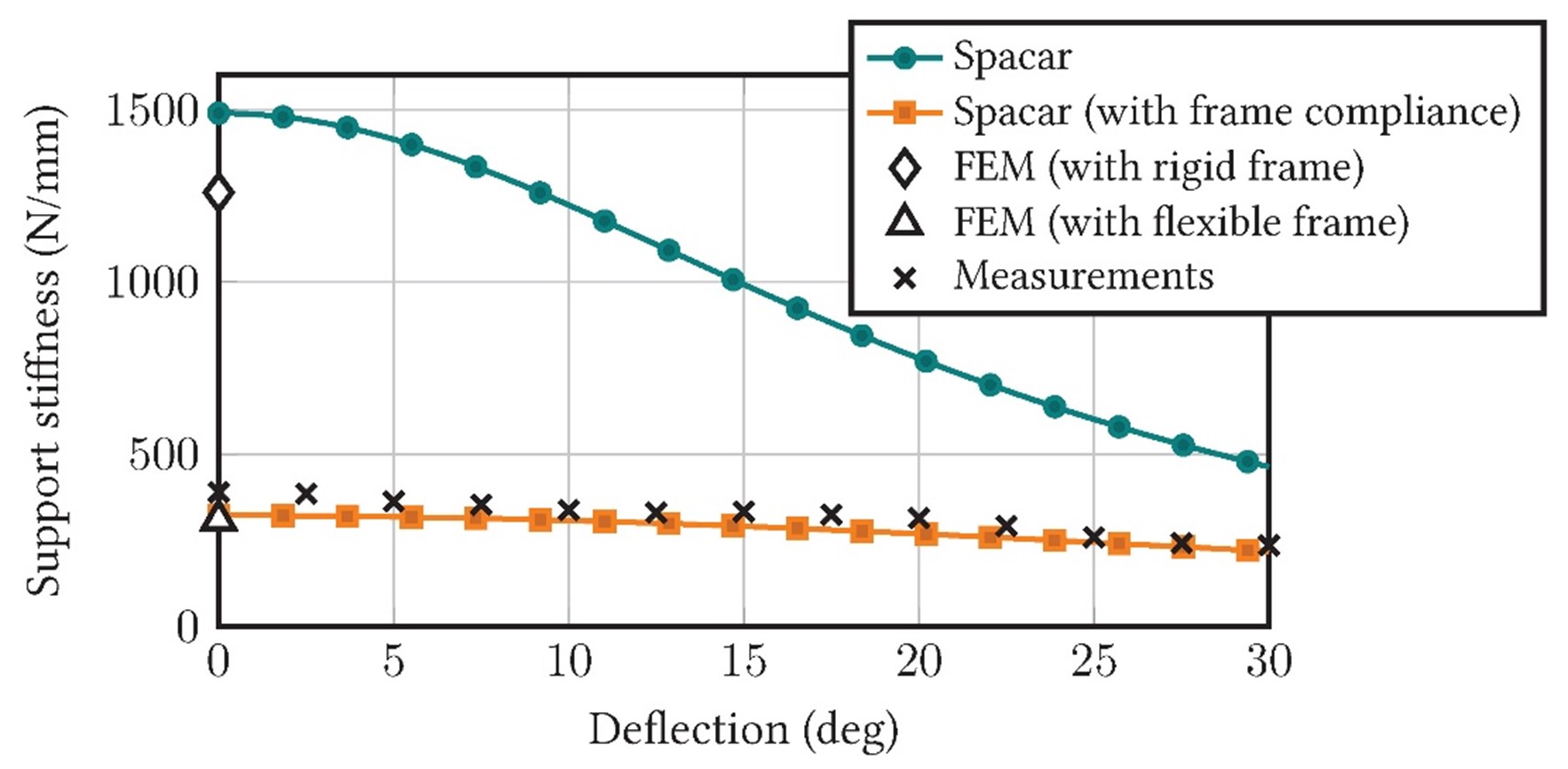 |
| Figure 7. Experimental validation of the translational support stiffness measured along the pan axis. Note the influence of the frame compliance. This can be minimized by reducing the distance between the folded leafsprings attached to intermediate body [2]. |
Principle
A large range of motion spherical flexure joint can be obtained by using a topology with 2 stages in series each stage comprising three folded leafsprings in parallel, of which all folding lines intersect at a single point. With this design the deformations of the flexures are halved allowing for stiffer flexures for the same level of stress. This is due to the strong decrease of stiffness of stiffness of flexures with increasing range of motion: compliance ~ (range of motion)5 [3]. This results in a significant increase in support stiffness, although it comes at the cost of an underconstrained intermediate body which could require additional damping or a synchronizing mechanism.
Conclusion
Structural optimizations on a diverse set of flexure topologies have resulted in a flexure-based spherical joint which allows for ±30 degrees tip-tilt and ±10 degrees pan motion. At maximum deflection, this joint maintains a support stiffness of over 200 N/mm, which is more then an order of magnitude higher than the current state of the art spherical flexure joints with similar range of motion. Furthermore, load capacity is unmatched (290 N at 30 degrees tip-tilt) and pivot shift remains below 0.5 mm for a combined 30 degrees tip-tilt and 10 degrees twist motion. Experimental validations verify the simulated performance and confirm the high support stiffness and load capacity over the entire range of motion.
Developed by University of Twente
- M. Naves, R.G.K.M. Aarts, D.M. Brouwer
Referentie Bron
[1] M. Naves , M. Nijenhuis, B. Seinhorst, W. Hakvoort, D.M. Brouwer, (2021). T-Flex: A fully flexure-based large range of motion precision hexapod. Precision engineering, 72, 912-928. https://doi.org/10.1016/j.precisioneng.2021.08.015
[2] S.T. Smith, D.M. Brouwer, M. Nijenhuis, K. Arumugam, Flexures, CRC Press, expected in 2025.
[3] M. Naves, R.G.K.M. Aarts, D.M. Brouwer, (2019) Large stroke high off-axis stiffness three degree of freedom spherical flexure joint, Precision engineering, Volume 56, pp. 422-431. https://doi.org/10.1016/j.precisioneng.2019.01.011.