Chapter 2 - Design using flexures
Chapter 3 - Design for static stiffness
Flexure based 6 DOF parallel manipulator for fast adaptive optics
For an adaptive optics setup, a demonstrator was developed to manipulate an optical element in at least 5 DOFs, while keeping the 6th DOF, a rotation around the optical axis, stationary [1]. For practical reasons a 6 DOFs mechanism was developed with parallel kinematics and 6 linear actuators at the base. To exactly constrain the mechanism, the links between the actuators and the end effector each constrain 1 DOF, equivalent to a wire-flexure. However, the range of motion in particular the rotations and the critical load required a 1 constraint element rendered wire-flexure too risky. Therefore, each link consists of 2×2 in series stacked cross flexure hinges and a torsion compliant midpart, shown in Figure 1. The range of motion of the end-effector is 5 mm translations and 10° rotations with micrometer repeatability.
The orientations of the links were optimized based on maximizing the lowest parasitic eigenfrequency by iteration of an optimization algorithm together with dynamic analysis of a parametric model in SPACAR. This optimization caused the organic shape of the end effector as well as the frame.
The mechanism is actuated by linear voice coil motors with integrated encoders and an integrated linear roller guidance. The first measured disturbing mode shape arises above 200 Hz, and based on the FRF a control bandwidth of 50 Hz was realized. The measured repeatability was respectively ±2 𝜇𝑚 and ±4 𝜇𝑚 for the x- and y-direction and ±35 𝜇rad and ±37 𝜇rad for the x- and y- rotations. Although collocated, the roller bearings in the voice coils limited the repeatability. The settling time was in the order of 50ms.
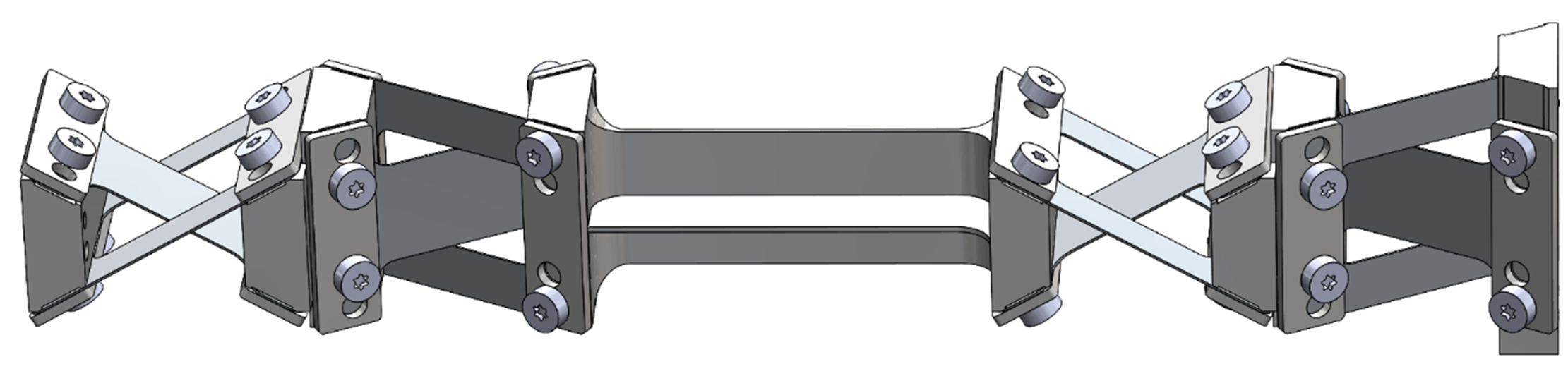
Figure 1. Equivalent wire flexure consisting of 2×2 in series stacked cross flexures and a torsion compliant midpart.


Figure 2. Realized manipulator
References
[1] Guilherme Mallmann, Kevin Voss, Steffen Resink and Albert Borreman, Work in progress: Smart Micromachining, Mikroniek (4) 2015, pp.5-11
Development
Otte Haitsma, Demcon.