NEWS 28 February 2023
ROS2 motion controllers for mobile robot navigation
There is an increasing need for deploying Autonomous Mobile Robots (AMRs) in the care sector, the public domain (hospitality and surveillance) and the industry (inspection, maintenance, logistics and agriculture).
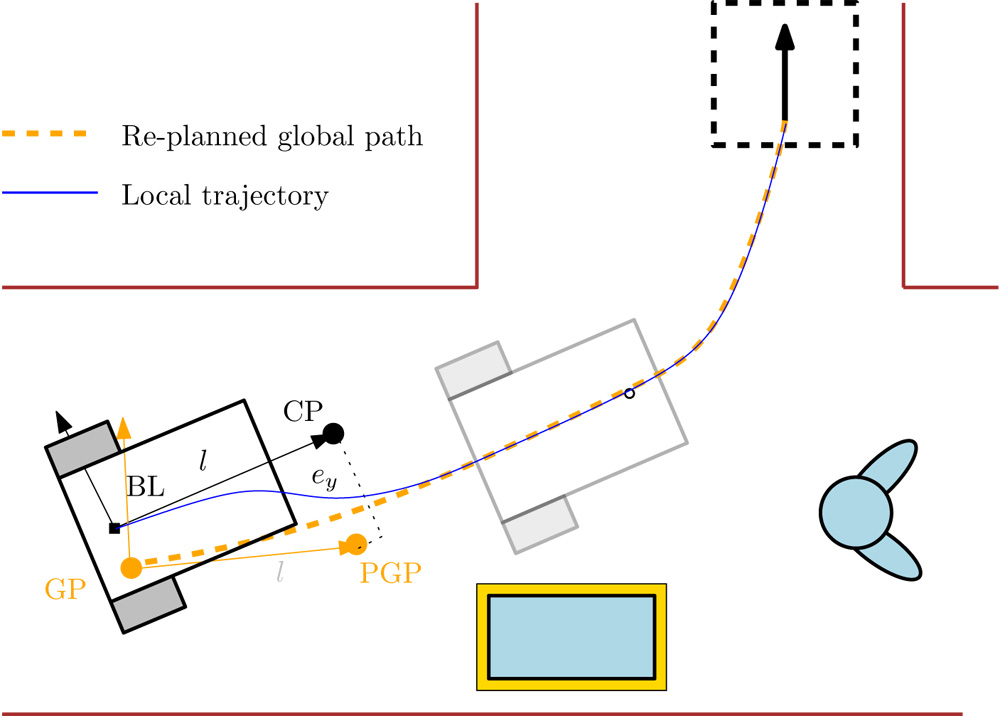
One of the challenges when developing mobile robot navigation technology is selecting the right, application-specific motion controller. The different motion controllers available in the ROS2 robot operating system framework have been tested on two robots with a different footprint performing various tasks, as described in this Mikroniek article. The results have been translated into a concise selection guideline. (Image courtesy of Nobleo).