Lunch Lecture September 5 hosted by TU/e
Position-Dependent Snap Feedforward: A Gaussian Process Framework
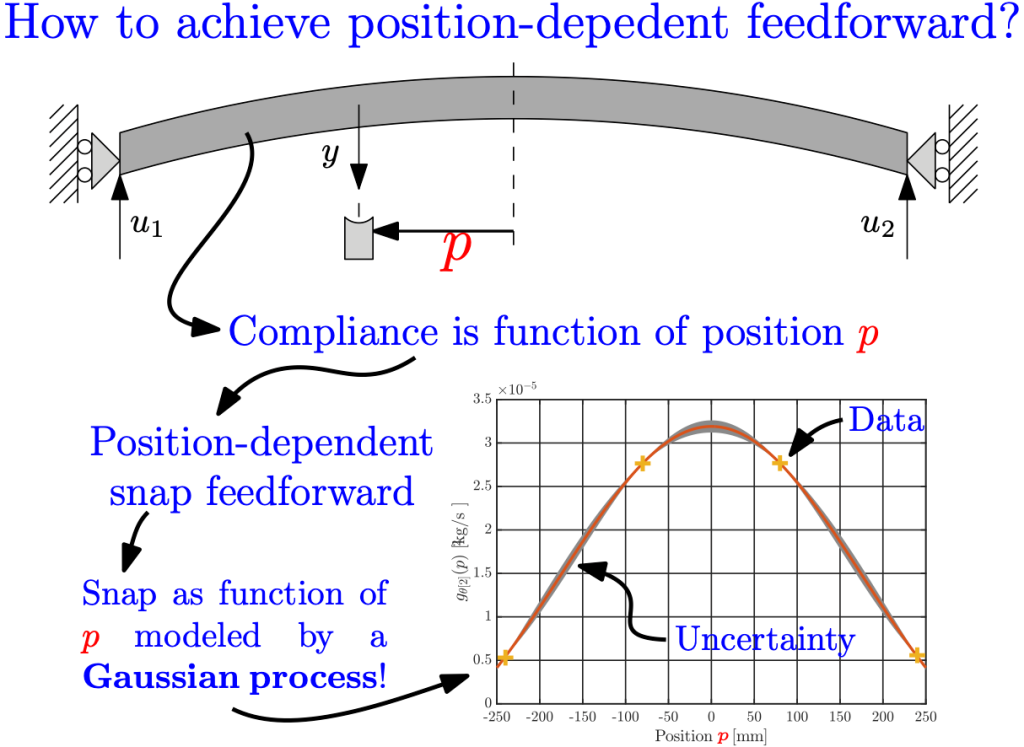
The low-frequency contribution of the flexible dynamics, i.e. the compliance, should be compensated for by means of snap feedforward to achieve high accuracy. Position-dependent compliance, which often occurs in motion systems, requires the snap feedforward parameter to be modeled as a function of position. Position-dependent compliance is compensated for by using a Gaussian process to model the snap feedforward parameter as a continuous function of position. A simulation of a flexible beam shows significant performance increase when using the Gaussian process snap feedforward parameter to compensate for position-dependent compliance.
The speaker will be: Maurice Poot, PhD Candidate at Eindhoven University of Technology
We will start at 12:02pm on September 5 2022
Please send an email to info@dspe.nl if you are interested in this Lunch lecture.