EVENT 4 July 2022
Lunch Lecture September hosted by TU/e
Mechatronic systems have increasingly high performance requirements for motion control.
About this event
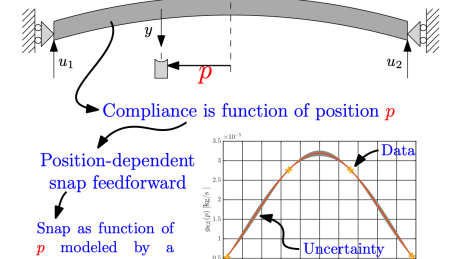
Position-Dependent Snap Feedforward: A Gaussian Process Framework
The low-frequency contribution of the flexible dynamics, i.e. the compliance, should be compensated for by means of snap feedforward to achieve high accuracy. Position-dependent compliance, which often occurs in motion systems, requires the snap feedforward parameter to be modeled as a function of position. Position-dependent compliance is compensated for by using a Gaussian process to model the snap feedforward parameter as a continuous function of position. A simulation of a flexible beam shows significant performance increase when using the Gaussian process snap feedforward parameter to compensate for position-dependent compliance.
The speaker will be: Maurice Poot, PhD Candidate at Eindhoven University of Technology
We will start at 12:02pm on September 5 2022
Please send an email to info@dspe.nl if you are interested in this Lunch lecture.
The Netherlands
DigitalReferences

Microcredentials: macro-effect for professionals
This month, the first microcredentials have been awarded to the participants who successfully took part 1 of the course ‘Mechatronics System Design’ by Mechatronics Academy in cooperation with their partner High Tech Institute.
Read more
Gas Bearing workshop 2025
For 10 years the Gas Bearing Workshop has been the most specific forum for the gas bearing community in the western world.
Read more